エムアールテック
中小企業の自働化支援コンサルティング 自動機 FAの受注製作 制御回路設計 ロボットティーチング作業
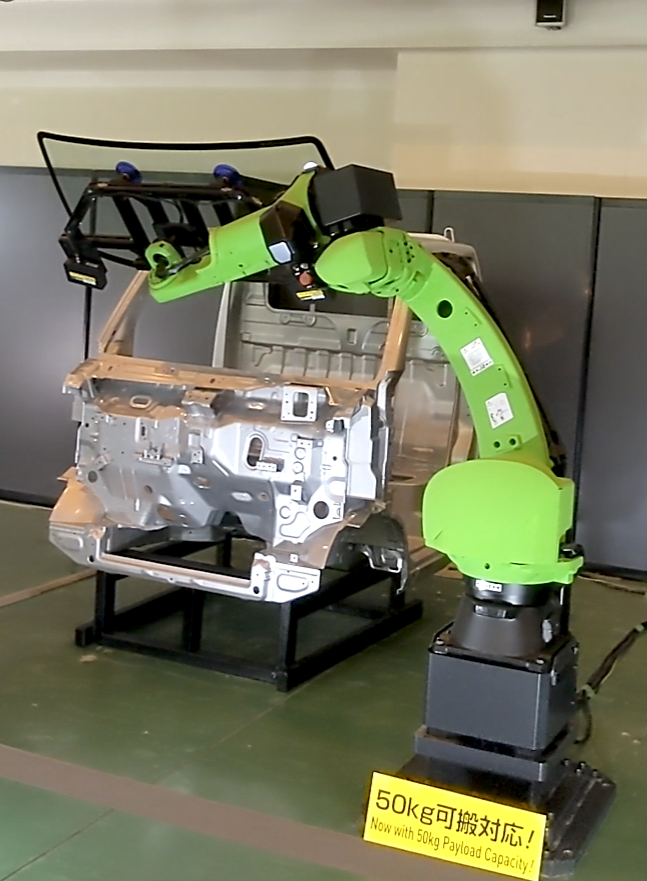
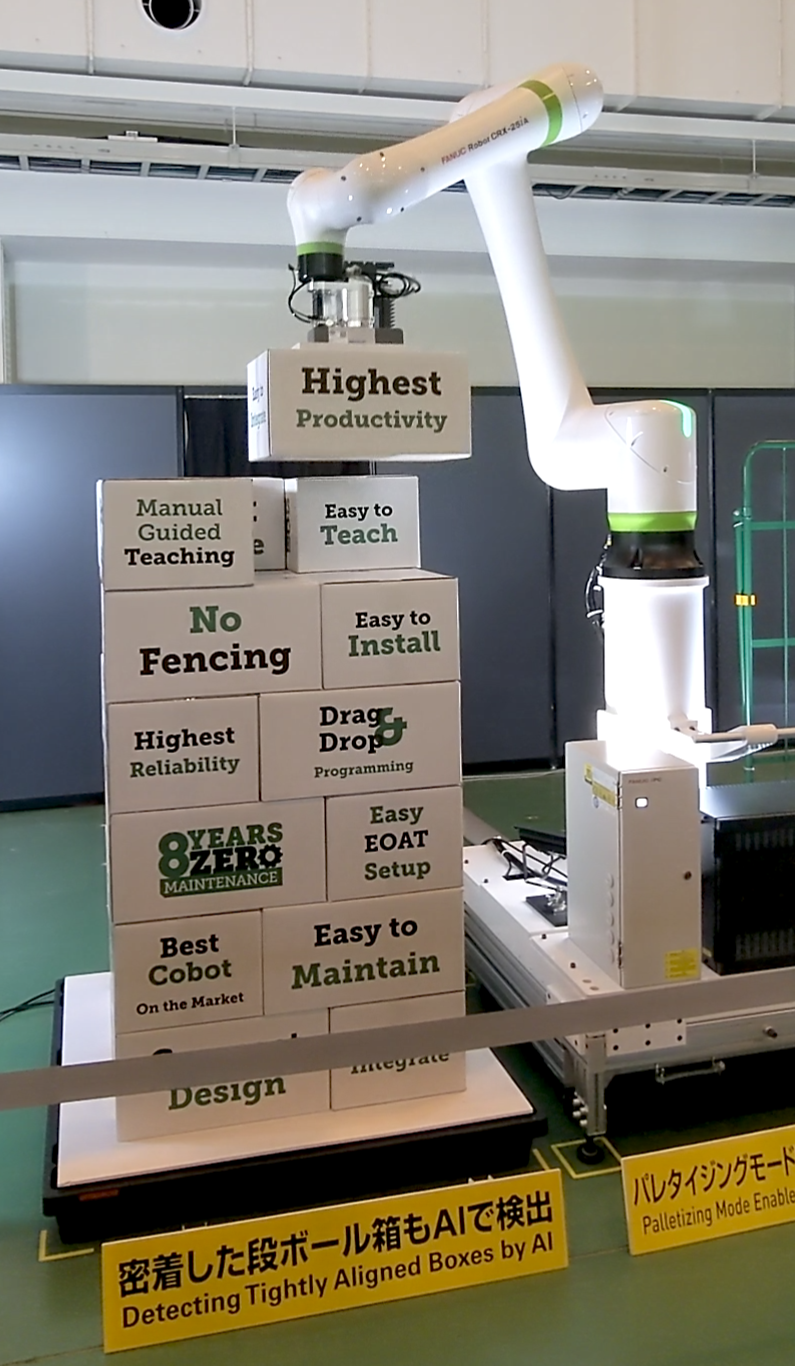
最近はやりの協働ロボットの大型化が進んでいます。
機種によっては最大50Kg可搬まできています、話を聞いてみるとまだまだその傾向は進みそうだとのことです。
協働ロボットは普通の産業ロボットと違って可搬重量の状態を意識しないといけないとの条件が加わります、設定以上の外力
が加わったら何かに接触していると判断するためで、ワークが無い状態と有る状態では可搬状態を当然変えてあげないといけ
ません、あとモーメントも気を付けないとですね。
産業ロボットの時は多少は大めに設定することもありましたが、協働ロボットでそれを行うと接触の際の感度が鈍ることにも
繋がるので気を付けないといけないです。
あとは動作経路の自動生成技術でしょうか、これがもっと進むと効率的な動作が得られるようになると思います。